
Articles récents
DOMOTIQUE : DÃĐtecteur d'ouverture porte de garage avec ESP32 et LORAWAN

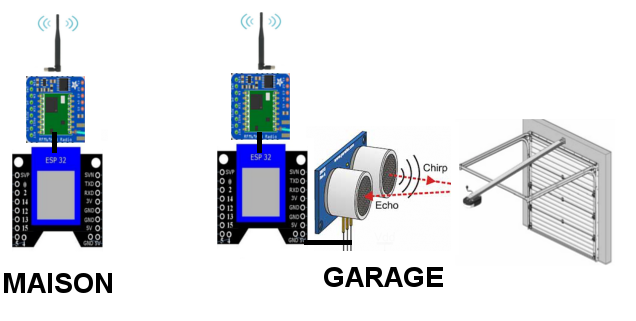
Dans cet article, je vais vous montrer comment j'ai rÃĐalisÃĐ un dÃĐtecteur d'ouverture de porte pour mon garage avec transmission de la dÃĐtection LORA.
J'ai bien essayÃĐ de le faire en WIFI avec un raspberry Zero W, mais cette solution n'est pas assez stable (perte de rÃĐseau, plantage du raspberry). Donc j'ai optÃĐ pour l'utilisation d'un microcontrÃīleur (ESP32) et l'utilisation d'un protocole de transmission aÃĐrien fiable (LORA)
Principe
Je souhaite Être averti lorsque la porte de mon garage est ouverte. En sachant qu'il est un peu ÃĐcartÃĐ et donc que la rÃĐception WIFI n'est pas terrible. Et la bande passante en 433Mhz est trÃĻs encombrÃĐe. Donc le protocole LORA en 868Mhz m'avait semblÃĐ une bonne solution. Pour cela j'utilise des modules RFM95.Pour la dÃĐtection, j'ai optÃĐ pour le sonar HY-SRF05 qui va permettre de dÃĐtecter la distance entre l'ÃĐmetteur et un obstacle, la porte en lâoccurrence, et donc de sa position ouverte ou fermÃĐe.
La tÃĒche ÃĐtant assez simple et rÃĐpÃĐtitive, un microcontrÃīleur est tout indiquÃĐ pour notre petit systÃĻme. J'ai choisi, l'ESP32.
Le matÃĐriel
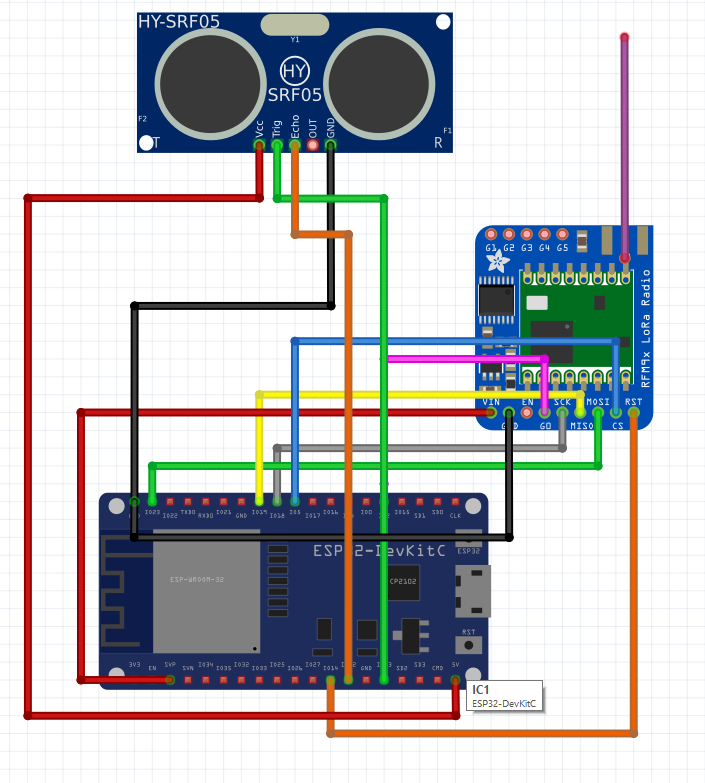
Pour notre systÃĻme il faudra donc:Le schÃĐma de cÃĒblage
Pour l'ÃĐmetteur du garage:
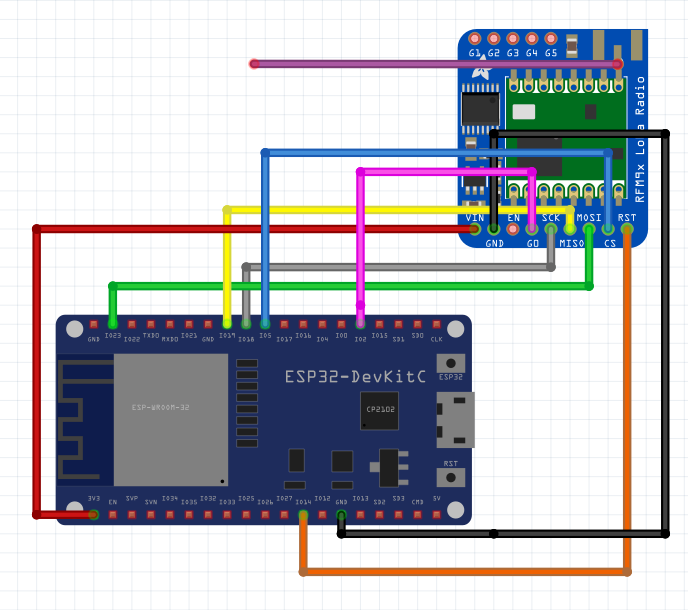
Pour le rÃĐcepteur de la maison:
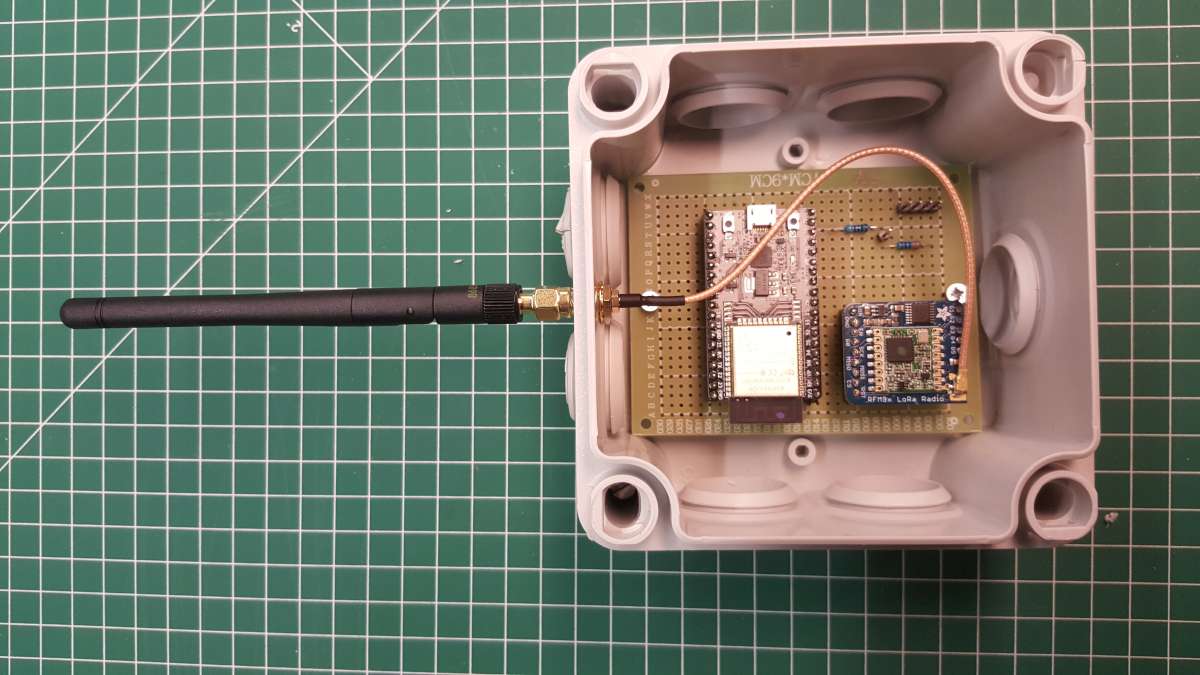
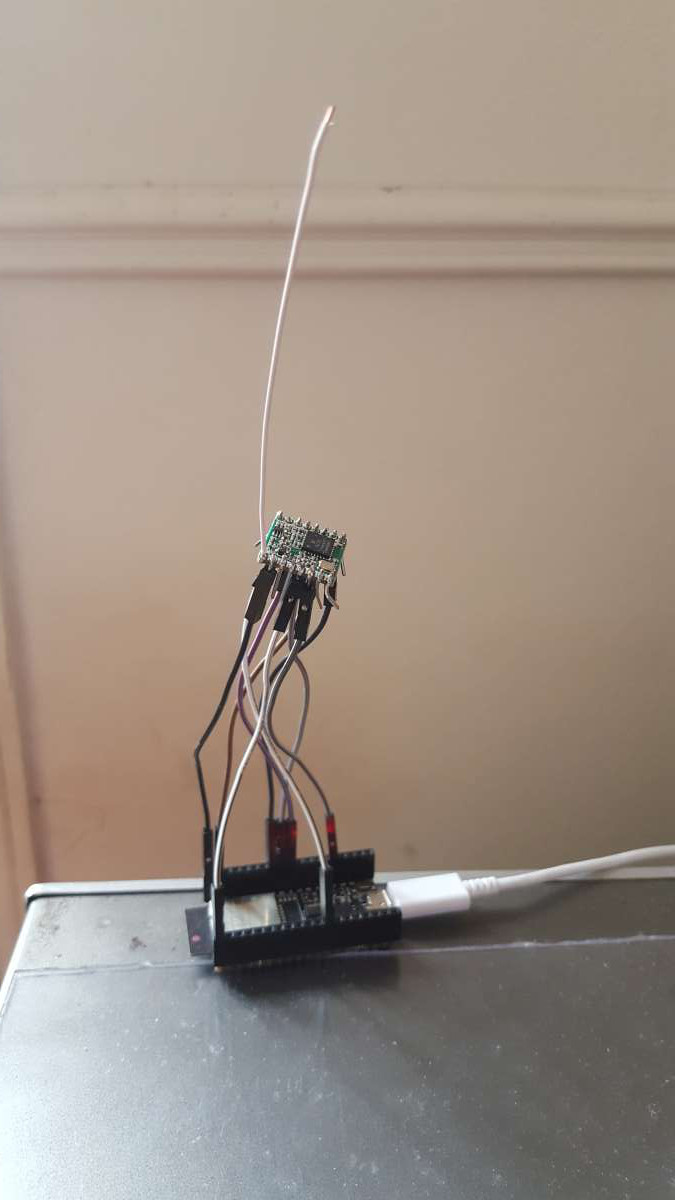
La rÃĐalisation
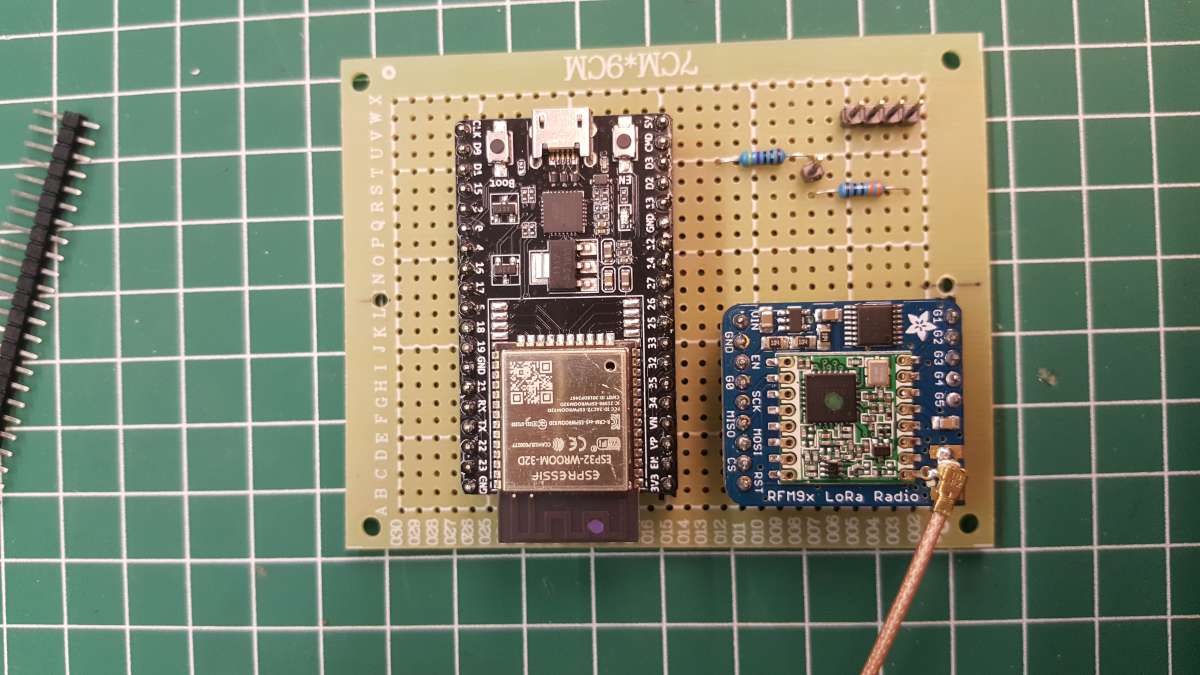
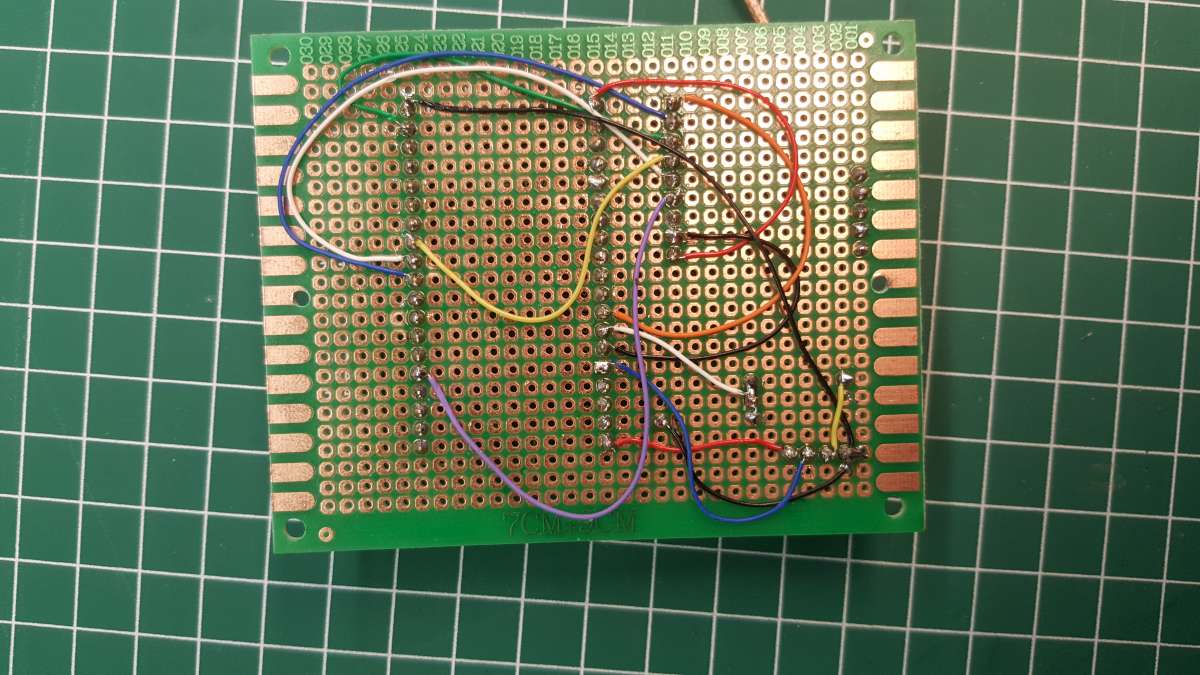
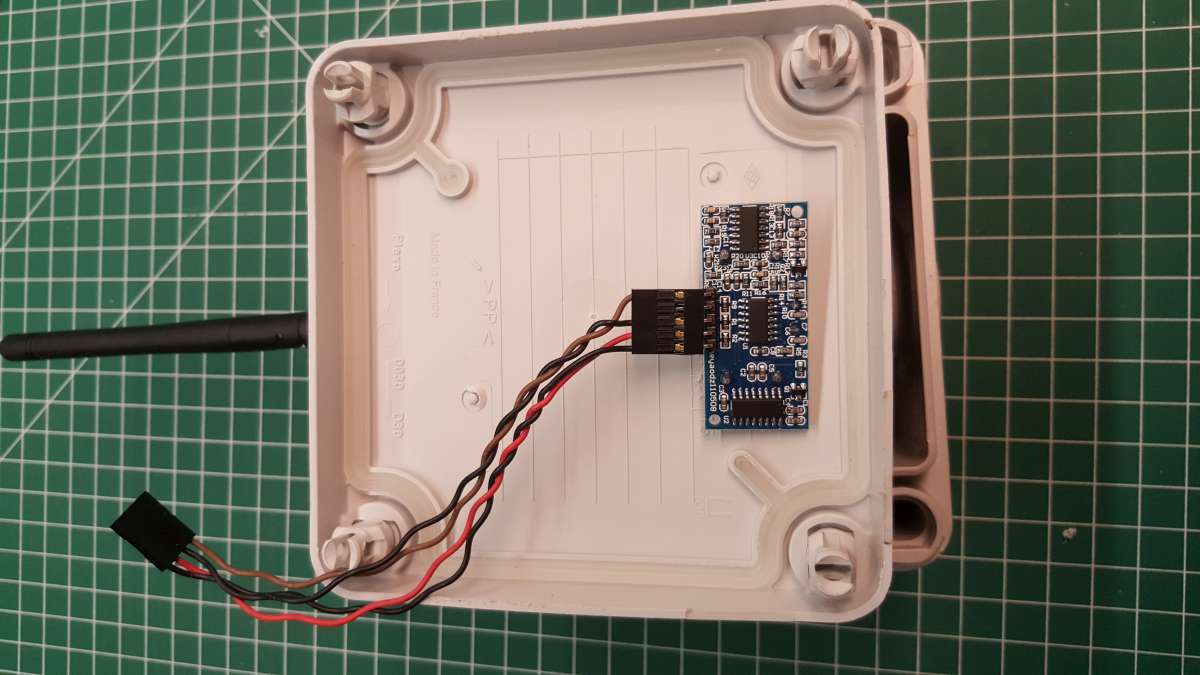
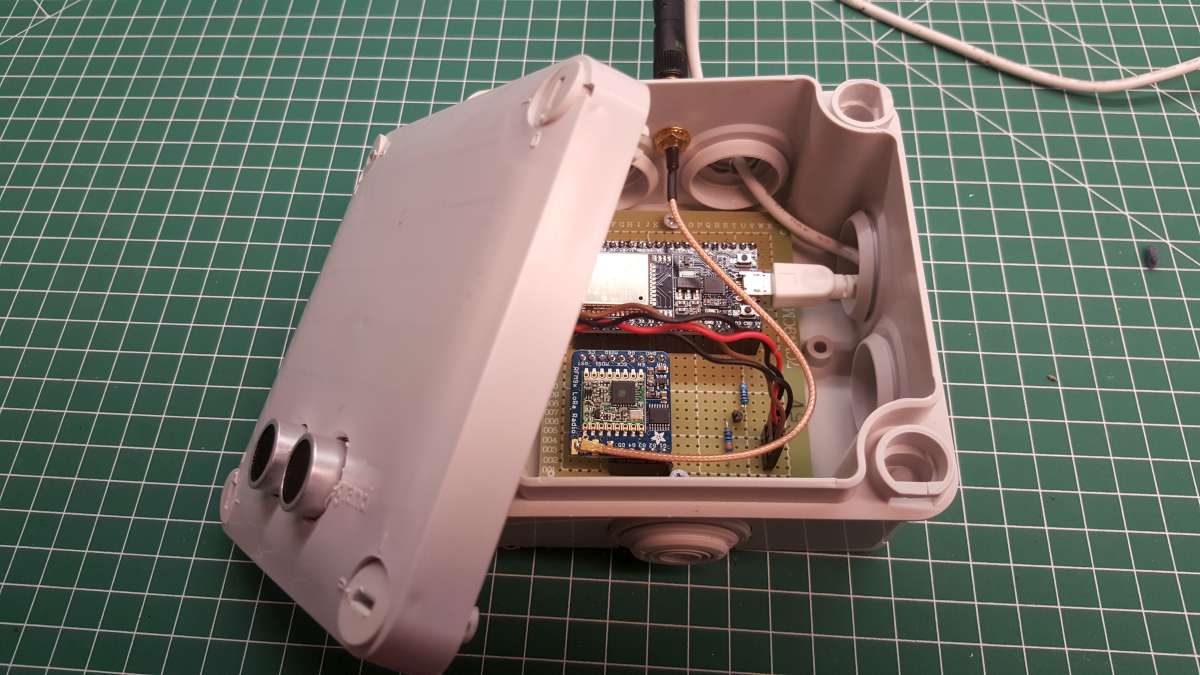
Voici quelques photos de la rÃĐalisation de lâÃĐmetteur du garage, au dÃĐpart tests sur breadboard, puis construction sur d'une plaquette PCB de prototypage. Le tout dans un boite de dÃĐrivation ÃĐlectrique.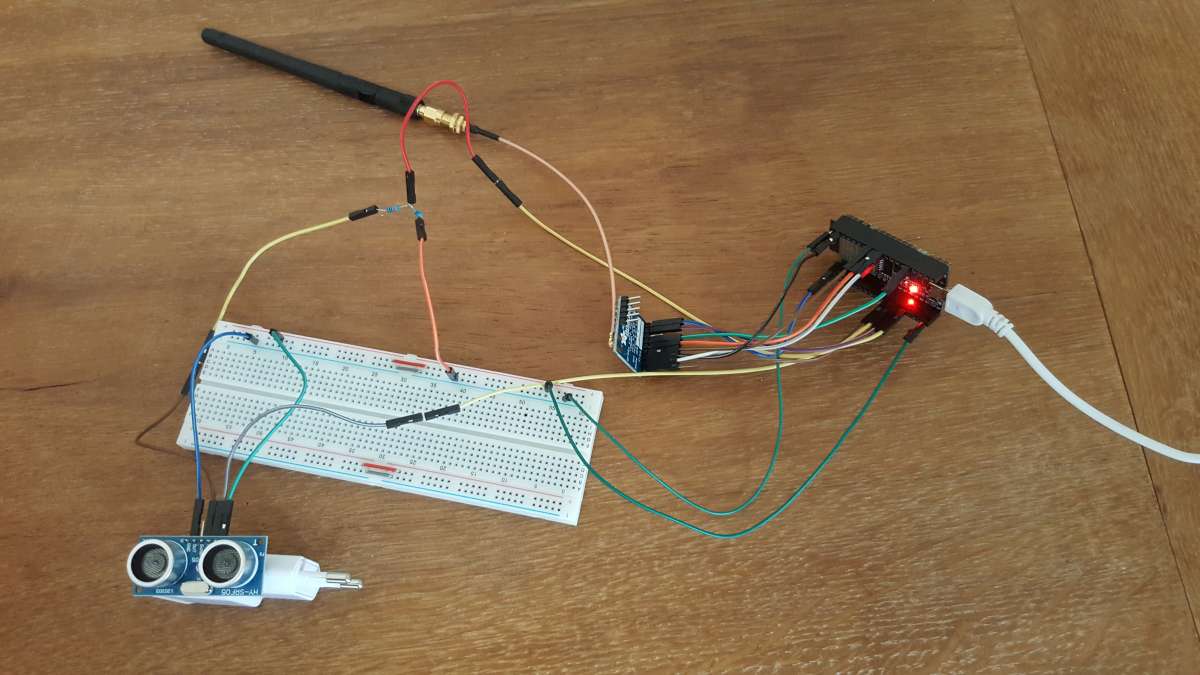


Le code
On va distinguer trois parties: le code de lâÃĐmetteur, celui du rÃĐcepteur de la maison et enfin celui de la mise à jour de la base de donnÃĐes pour mÃĐmoriser le changement de position.Code de l'ÃĐmetteur du garage: L'ÃĐmetteur mesure distance avec la porte et la transmet sur le rÃĐseau LORA.
/*********
Robert Dorigny le 14 fÃĐvrier 2019
www.doritique.fr
*********/
#include (SPI.h) //remplacer les () par <>
#include (LoRa.h)
//define the pins used by the transceiver module
#define ss 5
#define rst 14
#define dio0 2
const unsigned int TRIG_PIN=13;
const unsigned int ECHO_PIN=12;
int counter = 0;
//Calcul de la distance en cm
int dist() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration= pulseIn(ECHO_PIN, HIGH);
return(duration/29/2);
}
void setup() {
//Initialisation entrÃĐes/sorties sonar
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
//Initialisation sÃĐrie
Serial.begin(115200);
while (!Serial);
Serial.println("LoRa Sender");
//setup LoRa transceiver module
LoRa.setPins(ss, rst, dio0);
//replace the LoRa.begin(---E-) argument with your location's frequency
//433E6 for Asia
//866E6 for Europe
//915E6 for North America
while (!LoRa.begin(866E6)) {
Serial.println(".");
delay(500);
}
// Change sync word (0xF3) to match the receiver
// The sync word assures you don't get LoRa messages from other LoRa transceivers
// ranges from 0-0xFF
LoRa.setSyncWord(0xF3);
Serial.println("LoRa Initializing OK!");
}
void loop() {
Serial.print("Sending packet: ");
Serial.println(counter);
//Send LoRa packet to receiver
LoRa.beginPacket();
LoRa.print("dpg: "); //distance porte garage
LoRa.print(dist());
LoRa.endPacket();
counter++;
delay(10000);
}
Code du rÃĐcepteur de la maison: Le rÃĐcepteur rÃĐceptionne la trame LORA et rÃĐcupÃĻre la distance. Au bout de 3 dÃĐpassements du seuil, la porte est considÃĐrÃĐe comme ouverte et donc il y a mis à jour de la base de donnÃĐes avec une api en PHP; puis transmission d'un SMS (en utilisant l'api de l'opÃĐrateur Free).
/*********
Robert DORIGNY le 10 mars 2019
rdorigny@free.fr - www.doritique.fr
*********/
#include (WiFi.h) //remplacer les () par <>
#include (HTTPClient.h)
#include (SPI.h)
#include (LoRa.h)
#include "esp_system.h"
//Definition des pins du module de transmission
#define ss 5
#define rst 14
#define dio0 2
//Pour le wifi
const char* ssid = "votrerÃĐseau";
const char* password = "votremotdepasse";
int position=0; //Conserve en memoire la position de la porte, 0 pour fermee et 1 pour ouverte
int Mem[] = {0, 0, 0}; //Conserve en memoire les dernieres mesures
int Longueur_Seuil=300;
int cpt=0;
String LoRaData;
//Cette fonction initialise la variable position +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
int Recup_position(){
if(WiFi.status()== WL_CONNECTED) //Check WiFi connection status
{
//Emission de la requete vers l'API
HTTPClient http;
//Recup dans la base de donnÃĐes
http.begin("http://www.votresite.fr/monapi.php?action=get&var=garage");
http.addHeader("Content-Type", "text/plain"); //Specify content-type header
int httpResponseCode = http.POST("POSTING from ESP32"); //Send the actual POST request
if(httpResponseCode>0)
{
String response = http.getString();
Serial.println(httpResponseCode); //Print return code
Serial.println("Position intiale:"+response);
return(String(response).toInt());
}
}
}
//Cette fonction est appelÃĐe lorsqu'un changement de position de la porte est dÃĐtectÃĐ+++++++++++++++++++++++++++++++
void Send_Data(){
if(WiFi.status()== WL_CONNECTED) //Check WiFi connection status
{
//Emission de la requete vers l'API
HTTPClient http;
//Mise à jour de la base de donnÃĐes
http.begin("http://www.votresite.fr/monapi.php?action=set&var=garage&data="+String(position));
http.addHeader("Content-Type", "text/plain"); //Specify content-type header
int httpResponseCode = http.POST("POSTING from ESP32"); //Send the actual POST request
if(httpResponseCode>0)
{
String response = http.getString(); //Get the response to the request
Serial.println(httpResponseCode); //Print return code
Serial.println(response); //Print request answer
}
else
{
Serial.print("Error on sending POST: ");
Serial.println(httpResponseCode);
}
delay(2000);
//Envoi du SMS
String str="";
if (position==1)
str="ouverte";
else
str="fermÃĐe";
http.begin("https://smsapi.free-mobile.fr/sendmsg?user=codeuser&pass=clefreeK&msg=Porte%20garage%20"+str);
http.addHeader("Content-Type", "text/plain"); //Specify content-type header
httpResponseCode = http.POST("POSTING from ESP32"); //Send the actual POST request
if(httpResponseCode>0)
{
String response = http.getString(); //Get the response to the request
Serial.println(httpResponseCode); //Print return code
Serial.println(response); //Print request answer
}
else
{
Serial.print("Error on sending POST: ");
Serial.println(httpResponseCode);
}
http.end(); //Free resources
}
else
{
Serial.println("Perte de la connexion WIFI. Reboot automatique.");
esp_restart();
}
}
//Phase d'initialisation++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void setup() {
//initialize Serial Monitor
Serial.begin(115200);
delay(4000); //DÃĐlais nÃĐcessaire avant d'appeler le wifi
//Connexion au wifi
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) { //Check la connexion
delay(1000);
Serial.println("Tentative de connexion au WiFi...");
cpt++;
if (cpt>30)
{
Serial.println("Pas de connexion au wifi! Reboot automatique...");
esp_restart();
}
}
Serial.println("Connexion au rÃĐseau local wifi: OK!");
while (!Serial);
Serial.println("LoRa Receiver");
//setup position
position=Recup_position();
//setup LoRa transceiver module
LoRa.setPins(ss, rst, dio0);
//replace the LoRa.begin(---E-) argument with your location's frequency
//433E6 for Asia
//866E6 for Europe
//915E6 for North America
while (!LoRa.begin(866E6)) {
Serial.println(".");
delay(500);
}
// Change sync word (0xF3) to match the receiver
// The sync word assures you don't get LoRa messages from other LoRa transceivers
// ranges from 0-0xFF
LoRa.setSyncWord(0xF3);
Serial.println("LoRa Initializing OK!");
}
//Boucle d'attente de rÃĐception de la distance+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void loop() {
//delay(1000);
cpt++;
// try to parse packet
int packetSize = LoRa.parsePacket();
if (packetSize) {
// received a packet
Serial.print("Received packet '");
cpt=0;
// read packet
while (LoRa.available()) {
LoRaData = LoRa.readString();
Serial.print(LoRaData);
}
// print RSSI of packet
Serial.print("' with RSSI ");
Serial.println(LoRa.packetRssi());
//traitement de la distance
if (LoRaData.startsWith("dpg: ")){ //test si le paquet est valable
LoRaData.replace("dpg: ",""); //Vire le protocol
Serial.println(LoRaData);
int distance=LoRaData.toInt();
//Mise en mÃĐmoire des derniÃĻres positions
Mem[2]=Mem[1];
Mem[1]=Mem[0];
//Traitement de la distance
if (distance>Longueur_Seuil)
{
Serial.println("Porte ouverte");
Mem[0]=1;
if ((position==0)&&(Mem[0]==1)&&(Mem[1]==1)&&(Mem[2]==1))
{
position=1;
Serial.println("Chargement base: ouverte");
//Met à jour la base et envoie un SMS
Send_Data();
}
}
else
{
Serial.println("Porte fermÃĐe");
Mem[0]=0;
if ((position==1)&&(Mem[0]==0)&&(Mem[1]==0)&&(Mem[2]==0))
{
position=0;
Serial.println("Chargement base: fermÃĐe");
//Met à jour la base et envoie un SMS
Send_Data();
}
}
//Affiche la mÃĐmoire
for (int i = 0; i <= 2; i++) {
Serial.print(Mem[i]);
}
Serial.println(" ");
}
}
if (cpt>1000000) esp_restart();
}
Extrait de monapi.php: Voici un extrait de code pour mettre à jour un changement de position de la porte ou plus simplement connaitre le dernier ÃĐtat connue de la porte pour initialiser la variable position.
//******************************************************************************************
//Fonction d'injection des donnÃĐes
function api_set($var)
{
global $Connection;
global $_GET;
switch ($var)
{
case ("garage") : //insertion des logs d'ouverture et fermeture du garage
$data=$_GET["data"];
if (($data=="0")||($data=="1"))
{
$requete="insert into mon_garage (date,position) values ('".date("Y-m-d H:i:s")."',".$data.")";
$resultat=mysqli_query($Connection,$requete);
}
break;
default:
print("La variable appelÃĐe n'existe pas.");
}
}
//******************************************************************************************
//Fonction de rÃĐcupÃĐration des donnÃĐes
function api_get($var)
{
global $Connection;
switch ($var)
{
case ("garage") : //RÃĐcupÃĐration de la position de la porte du garage
$requete="select position from mon_garage ORDER BY num DESC LIMIT 1 ";
$resultat=mysqli_query($Connection,$requete);
if ($resultat)
{
$t2=mysqli_fetch_row($resultat);
print($t2[0]);
}
break;
default:
print("La variable appelÃĐe n'existe pas.");
}
}
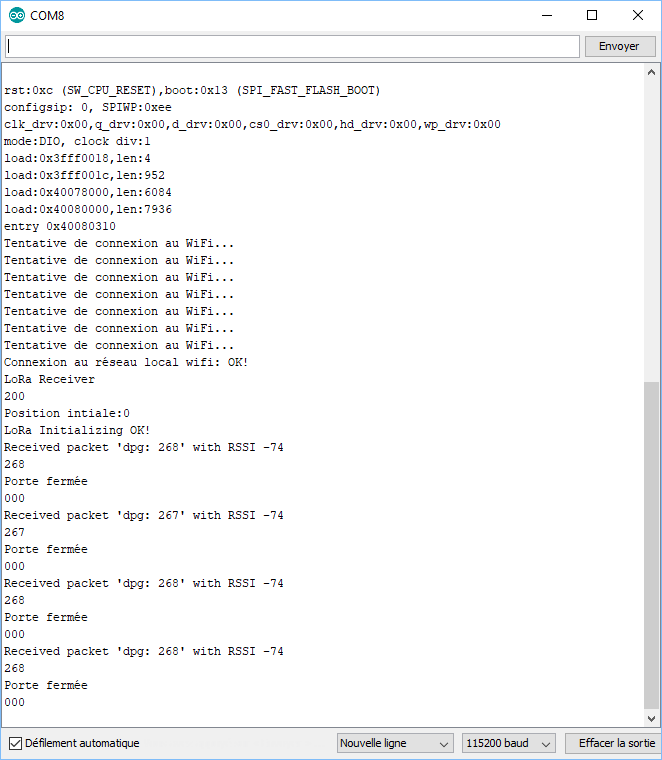
Ce qui donne sur le moniteur du rÃĐcepteur:
Conclusion
AprÃĻs un mois de test, mon systÃĻme fonctionne trÃĻs bien. Aucun plantage, comme j'avais avant avec le Raspberry pi qui perdait la connexion wifi. Je connais dÃĐsormais l'ÃĐtat d'ouverture de ma porte de garage.Pour le moment, le rÃĐcepteur maison est assez sommaire mais je prÃĐvois de le transformer en tant que centrale domotique avec un petit ÃĐcran LED (surement basÃĐe sur un ÃĐcran Nextion), un buzzer pour avertir de l'ouverture du garage et quelques options pas encore clairement dÃĐfinies. On en recause.
© 2025 www.doritique.fr par Robert DORIGNY