
Articles récents
STM32 : Les entrÃĐes-sorties

AprÃĻs avoir vu quelques articles de prÃĐsentation du STM32 et de son environnement de dÃĐveloppement, il est temps de rentrer dans le vif du sujet.
Nous allons commencer petit bras, avec un programme de commande d'entrÃĐes/sorties. Il faut bien dÃĐbuter par quelque chose. L'objectif de notre programme sera simplement de faire clignoter une led, et nous verrons qu'il y a dÃĐjà beaucoup de choses à prendre en compte.
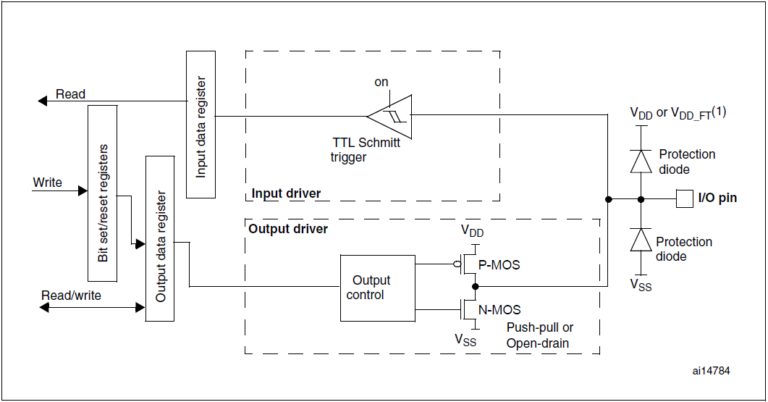
Le schÃĐma ci-dessous dÃĐcrit le principe GPIO. On notera le montage push-pull en sortie.
PrÃĐparation du programme
Donc ici, l'idÃĐe est de faire clignoter une led et de la commander par un des deux boutons poussoirs de la carte. Pour cela, on va prendre BP1 de la carte Nucleo (qui est rattachÃĐ Ã un GPIO, on verra cela plus tard).Donc, la premiÃĻre ÃĐtape consiste à ouvrir le STM32CubeMx en sÃĐlectionnant la carte NuclÃĐo F-401RE. A noter, la trÃĻs grande variÃĐtÃĐ dans le choix des cartes de dÃĐveloppement, c'est vraiment impressionnant.
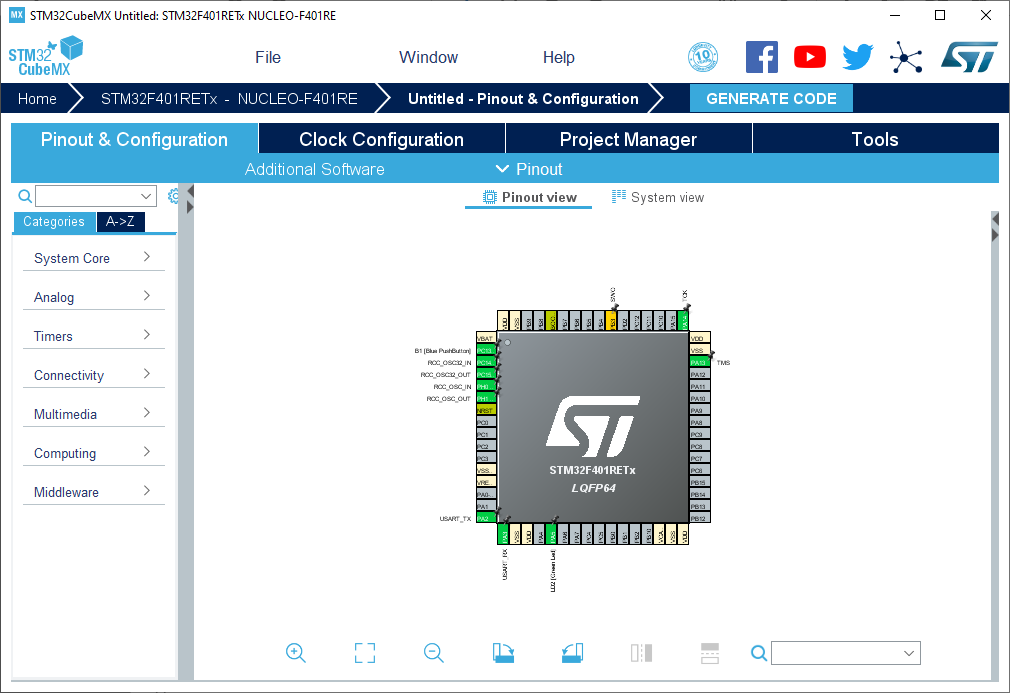
Sur la reprÃĐsentation graphique du STM32, on remarque que la pin PA5 est marquÃĐ LD2 [Green led], ce qui semble vouloir indiquer que cette pin est connectÃĐe à la led LED2 de la carte par construction. C'est parfait pour notre expÃĐrience.
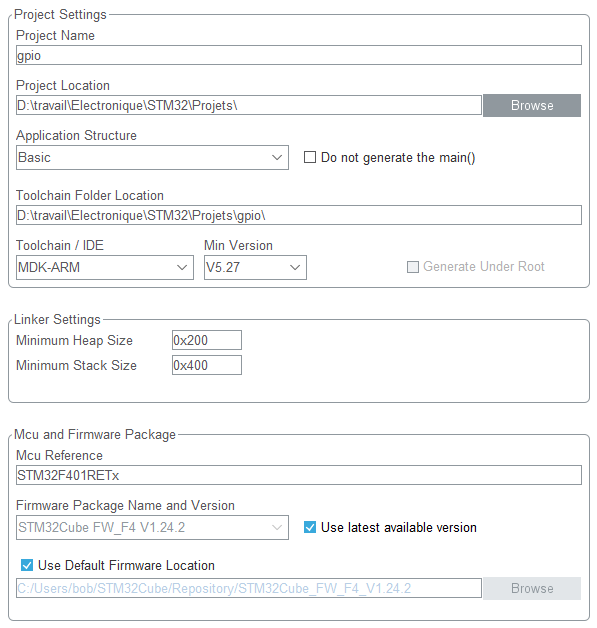
L'onglet Clock configuration est configurÃĐ avec les paramÃĻtres par dÃĐfaut de la carte NuclÃĐo. Dans l'onglet Project, il faut prÃĐciser le nom et l'emplacement du projet, ainsi que la toolchain en MDK-ARM.
Ensuite, il suffit de cliquer sur le bouton Generate code en haut à droite de l'interface. Un menu apparaÃŪt, il faut choisir l'option Open project. Keil UVision s'ouvre sur notre programme gÃĐnÃĐrÃĐ.
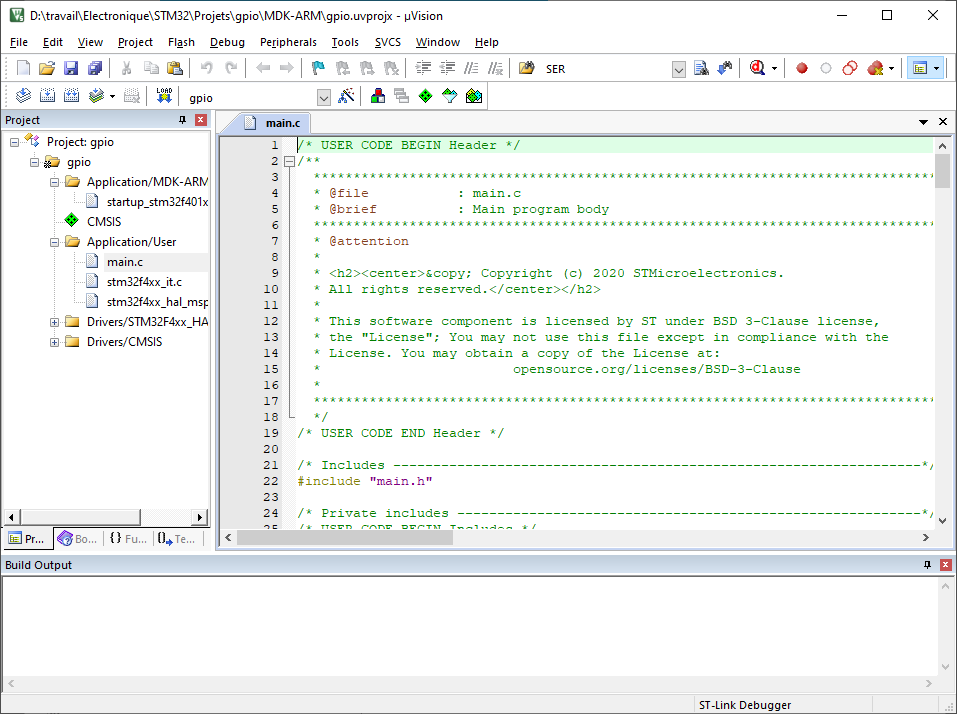
La gÃĐnÃĐration du code par le STM32CubeMX produit un fichier main.c qui est le programme principal, on y trouve des fonctions gÃĐnÃĐriques comme :

|
Le code utilisateur doit Être impÃĐrativement intÃĐgrÃĐ entre les diffÃĐrentes balises BEGIN et END. Tout ce qui sera ajoutÃĐ au mauvais endroit (c'est à dire en dehors de ces balises) sera ÃĐcrasÃĐ lors de la compilation. |
La fonction MX_GPIO_Init() initialise les GPIO du STM32, ici nous avons besoin de la LED2 et du bouton B1 pour stopper le clignotement de la LED.
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD2_Pin */
GPIO_InitStruct.Pin = LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);
}
Ensuite, on configure la LED sur PA5 Ã la valeur 0 par HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET) :
Enfin, on configure les GPIO en initialisant les donnÃĐes dans la structure. A noter que les champs :
Enfin, la fonction HAL_GPIO_Init() configure la broche avec les donnÃĐes initialisÃĐes dans la structure.
Le programme
La documentation du HAL pour les microcontroleurs STM32F4XX est ici. Vous trouverez toutes les fonctions du HAL utiles pour notre programme, et bien plus mÊme! . Globalement, on peut presque considÃĐrer que STM produit un framework pour chacun de ses microcontrÃīleurs. C'est quand mÊme impressionnant cette documentation, avec presque 2000 pages, c'est là que l'on voit que le STM32 est un petit bijou de technologie.int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if (HAL_GPIO_ReadPin(B1_GPIO_Port,B1_Pin)==0)
HAL_GPIO_WritePin(LD2_GPIO_Port,LD2_Pin,GPIO_PIN_RESET);
else
{
HAL_GPIO_TogglePin(LD2_GPIO_Port,LD2_Pin);
HAL_Delay(500);
HAL_GPIO_TogglePin(LD2_GPIO_Port,LD2_Pin);
HAL_Delay(500);
}
}
/* USER CODE END 3 */
}
Notre code est placÃĐ entre les balises USER CODE 3. En rÃĐsumÃĐ, on teste la valeur du bouton, s'il est à 0, on ÃĐteint la led, sinon on fait changer l'ÃĐtat de la led avec la fonction HAL_GPIO_TogglePin qui spÃĐcifie les broches à basculer. HAL_Delay(500) rÃĐalise une temporisation de 500ms (0.5s). Et si on appuie sur le BP1, cela arrÊte le clignotement de LED2.
Attention, une fois que l'on a chargÃĐ le programme, il est nÃĐcessaire dâappuyer sur le bouton de reset pour charger et exÃĐcuter le code.
Conclusion
Voilà , nous avons rÃĐalisÃĐ notre premier programme. J'ai pris soin de bien dÃĐcrire toute la dÃĐmarche avec l'environnement de dÃĐveloppement. A vous de jouer. Je conseille vivement l'acquisition de la carte NuclÃĐo qui est vraiment peu coÃŧteuse pour se faire la main.
© 2024 www.doritique.fr par Robert DORIGNY