
Articles récents
Domotique : Mesurer la distance avec un HY-SRF05

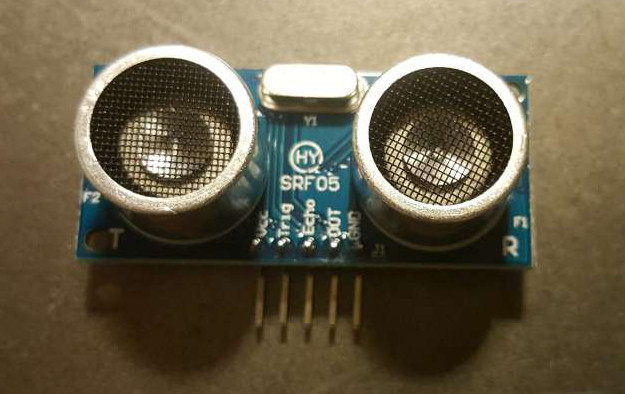
Dans cet article, je vous propose de voir (assez simplement) comment faire pour mesurer une distance avec un capteur Ă ultrason HY-SRF05.
Tout cela avec un raspberry pi et un peu de Python. Objectif du script est d'ĂŞtre en mesure de dĂŠtecter l'ouverture d'une porte.
Bref, l'idĂŠe est de rĂŠaliser un sonar directif afin de dĂŠterminer rĂŠguliĂŠrement (toutes les minutes par exemple) la distance capteur/porte. Si la porte est ouverte, le sonar indiquera un valeur diffĂŠrente ce qui permettra de se douter que la porte est ouverte.
J'aurais pu utiliser un dÊtecteur à effet hall, mais je n'ai rien trouvÊ de rÊaliste et mon idÊe de sonar me semble intÊressante à creuser. Donc j'ai commandÊ le capteur chez www.kubii.fr et reçu quelques jours aprÊs mon petit colis parfaitement emballÊ dans une pochette antistatique.

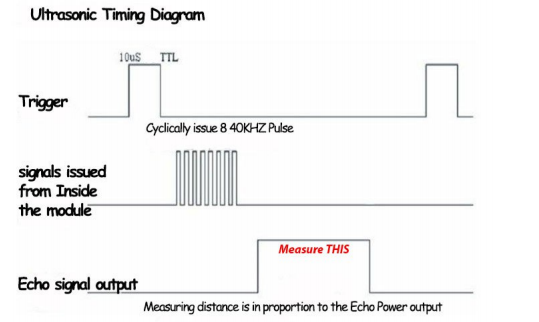
La vitesse du son est de 330m/s environ. S'agissant d'un ECHO, le son a donc rĂŠalisĂŠ deux fois la distance avec l'obstacle. Et donc, il suffit de diviser par deux notre distance pour connaitre la distance entre le capteur et l'obstacle.
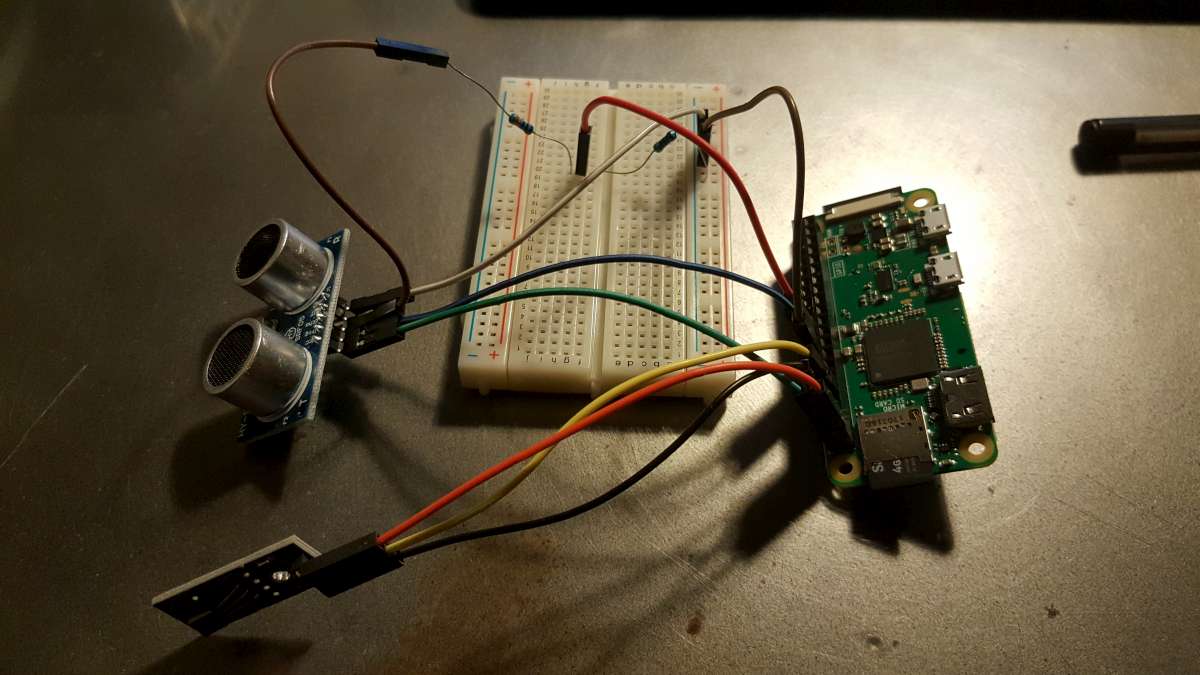
Le raccordement est assez simple. Vous le trouverez sur le schèma ci-dessous, les PIN GPIO du Raspberry sont prÊcisÊes sur la droite.
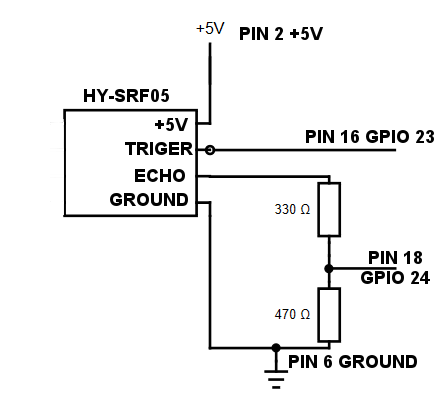
A noter que l'entrÊe sur le GPIO (numÊro 24) du Raspberry pi sur la patte ECHO du HY-SRF05 doit être à 3V environ. Donc il est nÊcessaire de faire un pont diviseur de tension avec deux rÊsistances (330 et 470 ohms) pour protèger la sortie +5V du HY-SRF05. Cela est vital à rÊaliser, sinon vous risquez d'endommager gravement votre Raspberry, il n'est pas protÊgÊ contre les surtensions.
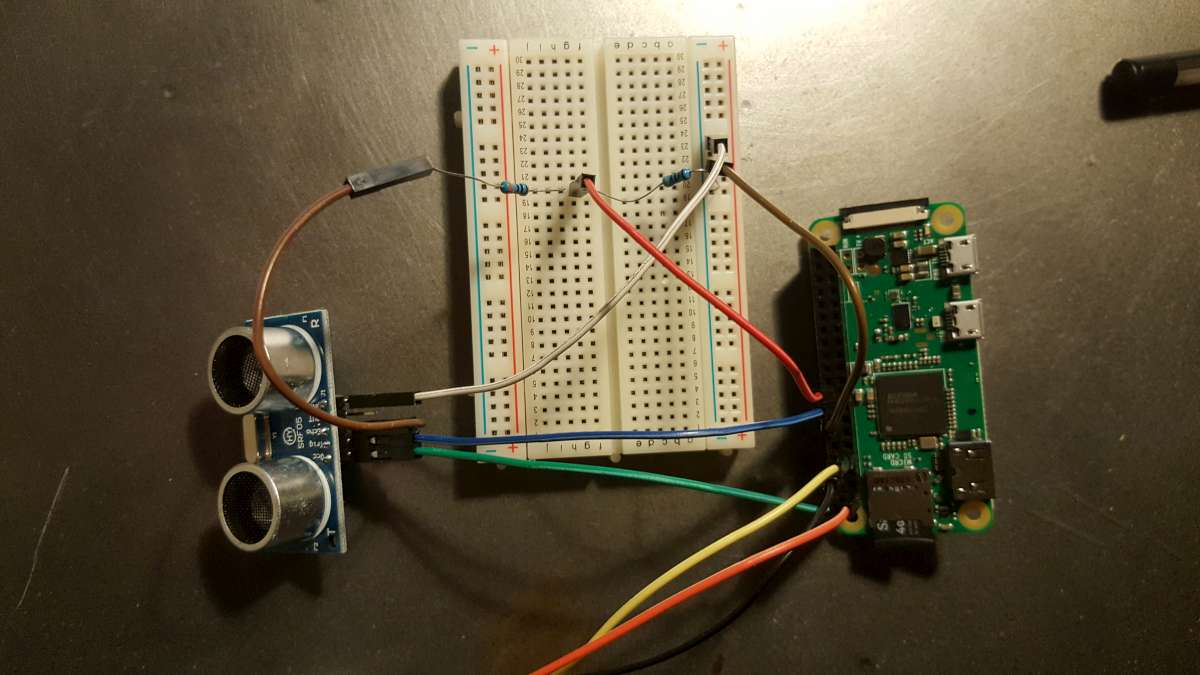
Voici mon montage avec les deux rĂŠsistances. (Vous noterez la prĂŠsence d'un capteur thermique ds18b20, j'ai eu la flemme de le retirer...).
La mesure se fait par un script en Python avec l'utilisation de la librairie RPI.GPIO :
#*****************************************************************************************************
#
# Robert DORIGNY - www.doritique.fr le 25 mars 2018
#
# Ce script pour construire un sonar avec un HY-SRF05
#
#*****************************************************************************************************
from __future__ import print_function
import os
import sys
#import pexpect
import time
import urllib2
import urllib
import threading
import RPi.GPIO as GPIO
GPIO_TRIGGER = 23
GPIO_ECHO = 24
speedSound = 33112
#Cette fonction mesure la distance
def measure():
#On lance un front pour lancer la mesure
GPIO.output(GPIO_TRIGGER, True)
# Attend 10us
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
start = time.time() #heure de debut
while GPIO.input(GPIO_ECHO)==0:
start = time.time()
while GPIO.input(GPIO_ECHO)==1:
stop = time.time()
elapsed = stop-start
distance = (elapsed * speedSound)/2
return distance
#Cette fonction effectue 3 mesures et retoune la valeur moyenne
def measure_average():
distance1=measure()
time.sleep(0.1)
distance2=measure()
time.sleep(0.1)
distance3=measure()
distance = distance1 + distance2 + distance3
distance = distance / 3
return distance
class myThread (threading.Thread):
def __init__(self,name):
threading.Thread.__init__(self)
self.name=name
def run(self):
#Recuperation des donnees
distance=measure_average()
print("Distance : {0:5.1f}".format(distance))
sys.exit()
#*******************************************Fonction principale************************************
def main():
#Mise en daemon
fpid = os.fork()
if fpid!=0:
# Fonctionne en daemon desormais. Le PID est fpid
sys.exit(0)
# Utilise le mode BCM des GPIO references
GPIO.setmode(GPIO.BCM)
# Setup des pins output et input
GPIO.setup(GPIO_TRIGGER,GPIO.OUT) # Trigger
GPIO.setup(GPIO_ECHO,GPIO.IN) # Echo
# Setup trigger pour False (niveau Low)
GPIO.output(GPIO_TRIGGER, False)
# Laisse du temps pour la prise en compte du setup
time.sleep(0.5)
try :
while True:
thread1 = myThread("HYSRF05")
thread1.start()
thread1.join()
time.sleep(10)
except KeyboardInterrupt:
# User pressed CTRL-C
# Reset GPIO settings
GPIO.cleanup()
if __name__ == "__main__":
main()
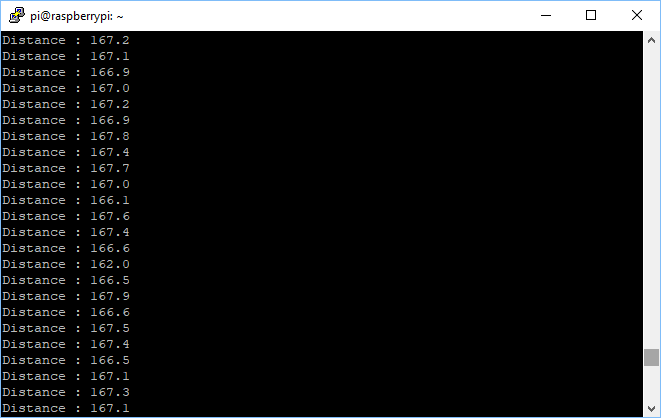
Ce qui donne: (Le capteur est positionnÊ sur une table, l'echo se fait sur le plafond. Les valeurs sont en centimètres.)
Conclusion
Le capteur Ă ultrason HY-SRF05 est parfaitement fonctionnel et vraiment simple d'utilisation avec un Rasperry pi. Il ne me reste plus qu'Ă l'installer dans mon garage pour dĂŠtecter l'ouverture de la porte sectionnelle.
© 2024 www.doritique.fr par Robert DORIGNY