
Articles récents
Linux/Unix : Les signaux entre processus

Un signal Unix est une information qui est envoyÃĐ Ã un processus. Ensuite, le processus interprÃĻte le code transmis et agit en consÃĐquence. Le signal est envoyÃĐ Ã un autre processus (ou à lui mÊme), c'est une technique pour dialoguer entre le pÃĻre et le fils.
C'est un mÃĐcanisme trÃĻs puissant qui n'est pas assez utilisÃĐ au vu de ce qu'il permet de faire.
1) GÃĐnÃĐralitÃĐs
Un signal est transmis d'un processus à un autre, et le rÃĐcepteur avise sur l'action à entreprendre. Il peut ne pas prendre en compte le signal, le capturer vers le gestionnaire de signal ou laisser le systÃĻme traiter le signal avec le comportement usuel.Le SystÃĻme dispose de NSIG signaux numÃĐrotÃĐs de 1 à NSIG. On retrouve les signaux connus par le systÃĻme sous /usr/include/signal.h ou /usr/include/asm/signal.h . A noter que la plupart des signaux sont transmis par le noyau et que certains signaux traitent des problÃĐmatiques de temps rÃĐels dÃĐfinis par Posix.
Les premiers signaux de la liste sont les signaux dits classiques (non temps rÃĐels), ensuite SIGRTMIN et SIGRTMAX encadre les signaux temps rÃĐels lorsqu'ils sont implÃĐmentÃĐs. Attention, les valeurs des signaux peuvent changer d'une distribution à une autre, aussi il trÃĻs vivement conseillÃĐ de travailler avec les codes plutÃīt qu'avec les valeurs.
Voici un exemple de contenu du fichier signal.h
Voyons la signification des diffÃĐrents signaux:
2) Envoi et rÃĐception des signaux
Un signal dit pendant est envoyÃĐ par un processus ou le noyau. Le signal est dit dÃĐlivrÃĐ lorsque le processus rÃĐalise l'action:On peut ÃĐgalement masquer ou bloquer un signal.
2.1) Envoi d'un signal
On utilise la fonction kill() pour envoyer un signal à un processus (en fait ne le tue pas nÃĐcessairement), tel que:int kill(pid_t pid, int numsignal);
Il est à noter que la commande kill -l liste les diffÃĐrents signaux du systÃĻme, ils peuvent diffÃĐrer d'une distribution à une autre c'est pourquoi il est vivement conseillÃĐ de coder avec nom des signaux pour avoir un code portable. La commande kill du bash est kill -code num_process.
Si kill(0) est diffÃĐrent de -1, c'est que le signal est encore vivant, cela permet de tester l'existence d'un signal.
Un exemple d'utilisation:
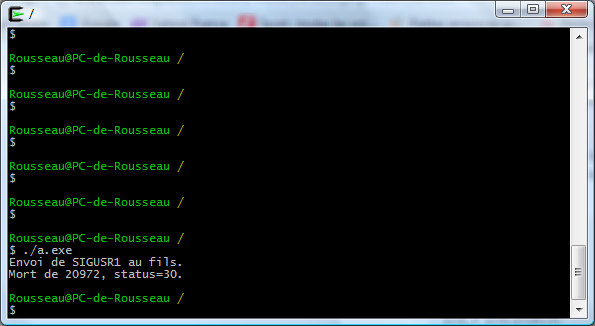
Par dÃĐfaut, la fonction kill() termine un processus, donc la commande kill(pid,SIGUSR1); termine le processus fils.
2.2) Le masquage des signaux
Il est possible de bloquer des signaux (sauf SIGKILL et SIGSTOP) par lâintermÃĐdiaire d'un masque mis en place par la fonction sigprocmask():nouveau est le nouveau masque et ancien celui d'avant. Le type sigset_t est le type des signaux. S'il n'y a pas de masque ancien à reprendre alors le troisiÃĻme paramÃĻtre est à NULL. Le paramÃĻtre opt dÃĐfinit l'action à rÃĐaliser en utilisant les constantes prÃĐdÃĐfinies:
2.2) Les fonctions relatives aux signaux
Le C systÃĻme pour unix propose des des fonctions permettant de manipuler les signauxNous allons crÃĐer un set de signaux masquÃĐs et voir comment afficher les signaux reçus:
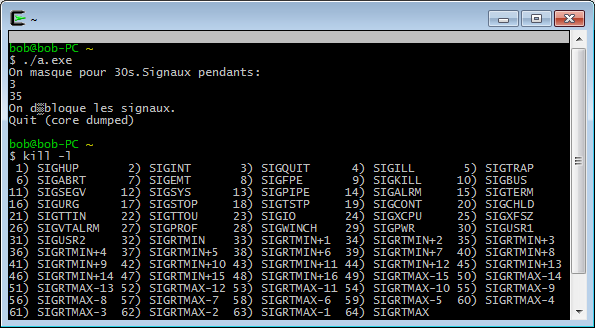
On constate que les signaux transmis comme CTRL + s'affichent par leurs numÃĐros. On ÃĐgalement envoyer un kill -3 numPID.
2.3) RÃĐception des signaux
Pour capter un signal, on utilise la fonction sigaction() et la structure associÃĐe.La fonction retourne 0 en cas de rÃĐussite et -1 sinon. Le premier paramÃĻtre est le signal, le second symbolise la structure sigaction et le dernier une structure sur l'ancien comportement (permet de le remettre une fois terminÃĐ). Pour la structure sigaction, le sa_handler peut prendre les valeurs:
Enfin, sa_mask indique le set de signaux concernÃĐs par l'action et sa_flags qui est un OU binaire des diffÃĐrentes constantes permettant de gÃĐrer le comportement du gestionnaire de signal.
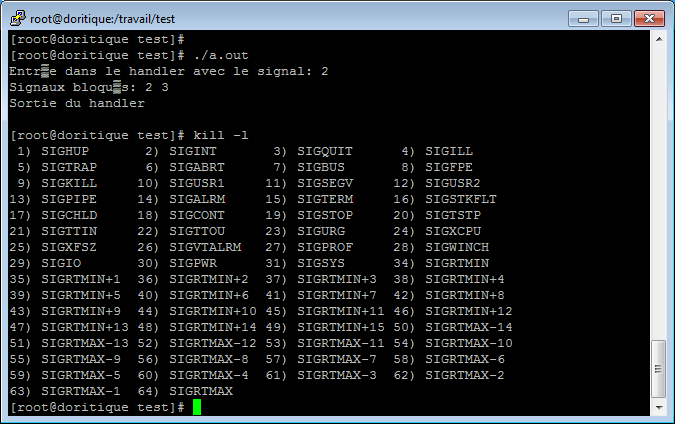
Vous trouverez ci-dessous un exemple de code qui dÃĐtourne le comportement normal du signal SIGQUIT et SIGINT:
Ce qui donne en faisant un CTRL+C:
2.3) Attente d'un signal
La fonction sigsuspend() rÃĐalise le masquage des signaux pointÃĐ par ens et la mise en sommeil jusqu'Ã l'arrivÃĐe d'un signal non-masquÃĐ ce qui provoque la mort du processus ou l'exÃĐcution du handler mis pour ce signal.
3) Les signaux temps-rÃĐel
Les signaux temps rÃĐels sont implÃĐmentÃĐs avec la norme POSIX. A la diffÃĐrence des autres signaux, ils n'ont pas de signification particuliÃĻre. Les signaux temps-rÃĐel sont compris entre SIGRTMIN et SIGRTMAX, attention le noyau ou d'autres applications peuvent utiliser les premiers signaux disponibles.Les caractÃĐristiques des signaux temps rÃĐels:
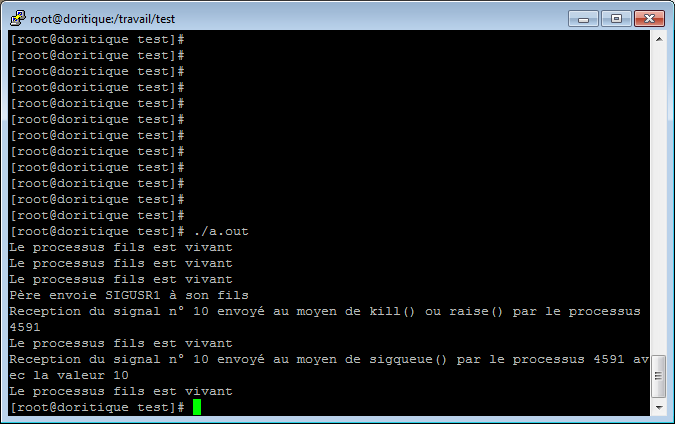
Pour transmettre des donnÃĐes avec le signal, il est nÃĐcessaire d'activer le flag SA_SIGINFO dans la structure sigaction et d'utiliser la fonction :
PlutÃīt qu'un long discours, voici un exemple qui reprend tout ce que nous avons vu:
Conclusion
Les signaux reprÃĐsentent un des moyens de discuter entre les diffÃĐrents processus, et nous avons vu qu'il est possible de transmettre des donnÃĐes, de tuer un processus ou encore de faire milles choses...
© 2026 www.doritique.fr par Robert DORIGNY