
Articles récents
TI Sensortag : RÃĐcupÃĐrer les donnÃĐes en BLE (partie 2)

Je vous avais prÃĐsentÃĐ le TI Sensortag CC2541 par l'article prÃĐcÃĐdent. C'est un petit bijou de technologie qui regroupe pas moins de six capteurs et dispose d'un ÃĐmetteur/rÃĐcepteur Bluetooth 4.0 Low Energy (BLE).
Dans cette article, nous allons voir comment automatiser une connexion BLE pour rÃĐcupÃĐrer les donnÃĐes des capteurs.
1)Projet de rÃĐalisation
Mon objectif est de rÃĐaliser une station mÃĐtÃĐo d'intÃĐrieur chargÃĐ de mesurer la tempÃĐrature, la pression et l'humiditÃĐ de la maison. Pour cela, je compte mettre en place l'architecture ci-dessous: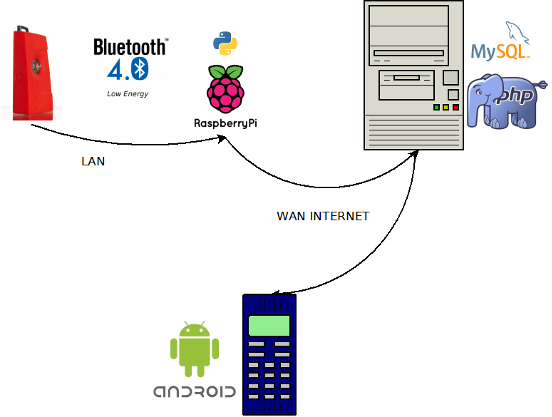
L'idÃĐe principale est de dÃĐdier un raspberry pi comme centrale domotique. Ce mini ordinateur fonctionne sous Linux et consomme trÃĻs peu d'ÃĐnergie (ce qui est intÃĐressant pour ne pas exploser ma facture d'ÃĐlectricitÃĐ).
Donc:
2)RÃĐcupÃĐration des donnÃĐes
2.1)GenÃĻse de la solution
Au niveau de la connexion sur le Sensortag, j'ai choisis d'utiliser une connexion classique en Bluetooth et non en IBeacon. Sachez nÃĐanmoins que le Sensortag est capable d'utiliser ce mÃĐcanisme : http://processors.wiki.ti.com/index.php/SensorTag_with_iBeaconLa premiÃĻre chose que j'ai essayÃĐ de faire, c'est de trouver de la documentation sur l'API du Bluez du stack Linux. Et bien..., impossible de trouver une documentation sur ce sujet! C'est mÊme presque scandaleux, s'afficher comme le "Official Linux Bluetooth protocol stack" et ne fournir aucune documentation pour les dÃĐveloppeurs, que fait Linus Torvalds! Bref,en recherchant une solution, je me suis rabattu sur un script Python grÃĒce à Michael Saunby. Petit hic, je ne connaissais pas ce langage il y a encore un mois, donc j'ai un peu bouquinÃĐ pendant les vacances... Python est un langage de script assez simple à apprendre si vous dÃĐjà quelques notions en langage de programmation, son apprentissage sera rapide.
Sur le dernier article, je vous avais montrÃĐ comment obtenir les valeurs en hexa des capteurs puis averti que Texas Instruments propose une page web de documentation (http://processors.wiki.ti.com/index.php/SensorTag_User_Guide) oÃđ l'on trouve comment sont structurÃĐes les donnÃĐes et surtout lâalgorithme de calcul des mesures pour chaque capteur. Donc, l'idÃĐe est d'interroger par un script Python la sonde en utilisant les commande shell de Bluez.
2.2)Le script
Ce qui affichera:
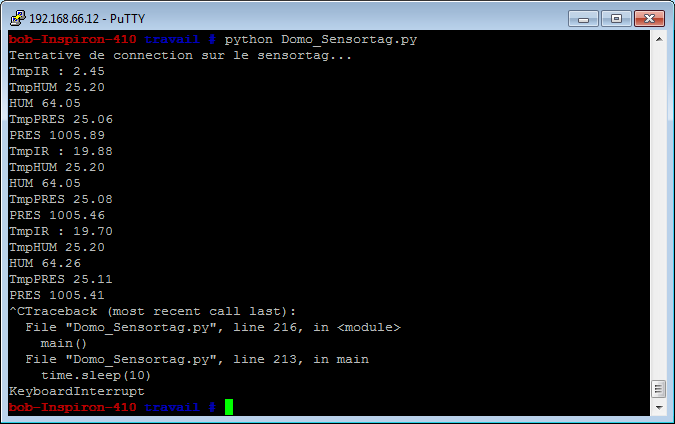
J'ai laissÃĐ le script faire trois mesures pour simplifier l'affichage, à noter que la premiÃĻre mesure du capteur de tempÃĐrature infra-rouge renvoie toujours 2.45°C. Heureusement, la seconde est bonne..., je n'ai pas compris pourquoi ce bug. Si quelqu'un à une idÃĐe, je suis preneur.
2.3)Explications
Quelques explications sur le fonctionnement de ce script:Conclusion
Voilà pour cet article. Sur le prochain, nous allons voir comment transmettre les donnÃĐes et traiter la rÃĐcupÃĐration/transmission des donnÃĐes par l'intermÃĐdiaire de Threads. Pourquoi des threads? Pour transmettre toutes les opÃĐrations risquÃĐes à un autre processus que le programme principal. L'intÃĐrÊt est simple, ÃĐviter de planter notre programme principal. Il s'agira ainsi de fiabiliser et pÃĐrenniser le bon fonctionnement de notre script.
© 2026 www.doritique.fr par Robert DORIGNY